



Le scarabée japonais, Popillia japonicaL'ortie royale est l'un des pires ravageurs invasifs d'Amérique du Nord. Les coûts de lutte contre ce ravageur aux États-Unis dépassent $450 millions par an. Le coléoptère a été détecté près de Milan en 2014 et commence à se propager en Europe. Avec 12 autres partenaires, Pessl Instruments a rejoint un projet IPM-Popillia pour s'attaquer au problème et développer une solution à ce problème urgent.

Objectifs du projet
- rendre la détection, l'identification et la surveillance du nouvel organisme nuisible plus rapides, plus efficaces et moins exigeantes en main-d'œuvre
- fournir une stratégie de surveillance optimale pour les espèces envahissantes et aider les responsables phytosanitaires et les décideurs politiques de l'UE à prendre des décisions sur les organismes nuisibles hautement prioritaires et à les gérer.
- sensibiliser le public aux espèces envahissantes et activer le potentiel de la science citoyenne
Description du travail dans le WP1
Le module de travail 1 est organisé en cinq tâches et comprend toutes les activités d'IPM-Popillia liées à la détection et à l'identification du ravageur, à la surveillance, à l'évaluation et à la modélisation des voies d'entrée et de propagation du ravageur invasif.
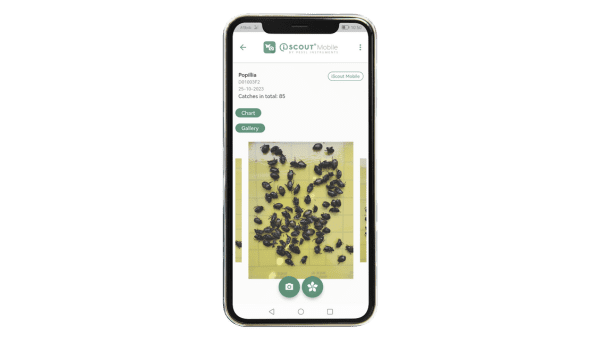
Tâche 1.1 : Outils innovants pour P. japonica détection et surveillance
La surveillance des organismes réglementés prend beaucoup de temps et nécessite une main-d'œuvre importante. Par conséquent, les services phytosanitaires régionaux doivent limiter le nombre de pièges inclus dans un programme de surveillance en fonction de la main-d'œuvre disponible pour l'entretien des pièges. Cela se fait au détriment de la zone couverte et de la densité de la grille de surveillance.
Pessl Instruments développe un outil adapté à la surveillance phytosanitaire des produits suivants P. japonica ainsi que pour l'observation de la dynamique saisonnière de populations déjà établies, sur la base de systèmes de pièges contrôlés à distance.
Ces pièges comprendront des dispositifs électroniques avec des objectifs de 10 MP sur le dessus du boîtier et seront autosuffisants grâce à une batterie et un panneau solaire. Le système de pièges sera équipé d'un leurre qui attirera l'espèce cible dans le système de pièges. Une fois entrés dans le piège, les insectes seront fixés et photographiés. Les photos serviront de base au développement d'un outil de détection automatique spécifique pour les espèces suivantes P. japonica.
Des systèmes d'apprentissage en profondeur utilisant des réseaux neuronaux artificiels entraîneront le système à détecter et à séparer les insectes cibles des insectes non cibles. D'autres mesures, telles que des alertes basées sur les résultats positifs de la détection par le logiciel, seront introduites. En outre, les pièges seront équipés de capteurs recueillant des données climatiques, telles que la température, l'humidité relative ou le vent, qui seront utilisées pour obtenir des informations plus détaillées sur le comportement de vol des insectes. P. japonica.
Les autres partenaires du projet installeront les premiers prototypes de pièges produits par Pessl dans les zones infestées des Açores, en Italie et en Suisse, afin d'évaluer l'outil de surveillance innovant dans des conditions de terrain. En plus de l'évaluation à distance, les prises de ces pièges seront également évaluées manuellement par des experts. Les résultats de ces efforts de surveillance seront comparés aux résultats de la surveillance automatisée et fourniront un retour d'information pour l'optimisation du logiciel de détection.
Outre les données de terrain, des scarabées japonais élevés en laboratoire et d'autres espèces étroitement apparentées (avec un fort potentiel de détection de "faux positifs"), ainsi que des photos de ces insectes, seront utilisés pour entraîner l'algorithme d'apprentissage profond à identifier et à séparer les cibles des non-cibles.
Qu'est-ce qui a été fait jusqu'à présent ?
- Spécimens et appâts spécifiques de P. japonica ont été livrés au PESSL afin de se familiariser avec les espèces d'insectes, la forme, l'identification des espèces.
- Discussion et travail sur le prototype du système de piège pour les études de terrain en Italie en 2021
- Les améliorations de l'unité de contrôle (HW et FW pour l'alimentation électrique) ont été mises en œuvre et sont maintenant en phase de test (capteurs attachés - température, humidité relative, pluviomètre).
- L'adaptation du détecteur général d'insectes à l'aide de l'IA (V7) est testée et bientôt en ligne.
- Recherche documentaire (notamment sur les systèmes de pièges manuels, le comportement de l'insecte)